2025年度汇总-成长
2026年开年之际,回顾过去一年的得失,希望今年生活平顺,事业能够取得进步~2025年是企业成立后的第三年,整体感觉过去一年的主旋律是成长,想要做的事情能够慢慢落地,能够感受到事情推进~希望2026年能够进步与成长~
2026年开年之际,回顾过去一年的得失,希望今年生活平顺,事业能够取得进步~2025年是企业成立后的第三年,整体感觉过去一年的主旋律是成长,想要做的事情能够慢慢落地,能够感受到事情推进~希望2026年能够进步与成长~
团队通过实时仿真,在不依赖昂贵复杂传感器的条件下,实现接触力的感知;该方法具有极高的性价比,制约因素在响应速度;我们通过机械手作为一个实验平台,通过舵机的扭矩实时感知抓取过程的接触压力和切应力,最终实现柔性抓取。
基于pix4,搭载激光雷达和摄像头,实现地形探测和感知。飞控可以基于地面站参数化配置,能够有效的节省调试时间,提高稳定性;orin nano 具有较好的计算能力,有效实现实时环境感知与结构状态监测。
通过摄像头获取三维应力场,实现结构的安全监测,最终应用于智能机器人实现柔性抓取以及物理交互。我们推出无线网络摄像头,能够基于WIFI获取结构的图像数据,后期基于AI算法实现特征参数的获取,最终实现结构力学量的感知。
实时仿真 — 便携式应力感知摄像头应用案例 Read More »
尺寸为:60mm*60mm*35mm;内置锂电池,采集的应变数据直接存储到SD卡,支持历史数据回溯;输出:RS485,标准modbus RTU协议,通讯支持115200。定:五段线性修正;采样速率:支持1280hz采样。
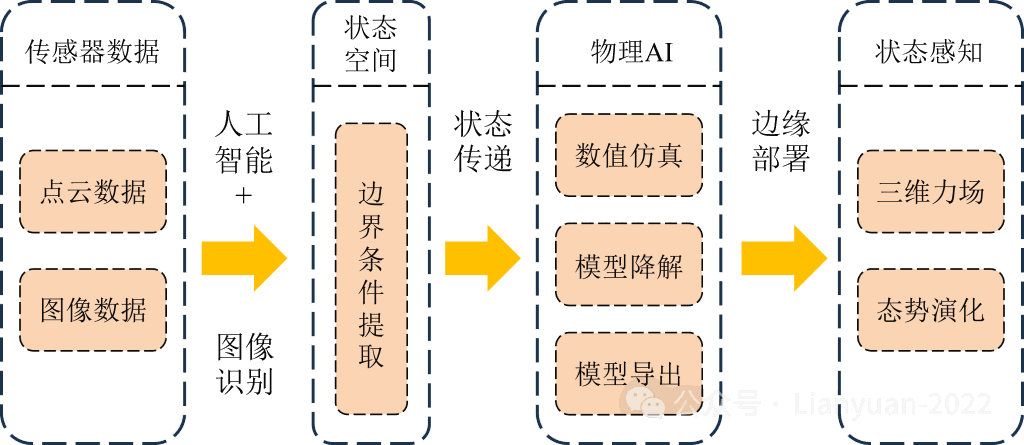
利用无人机采集高精度图像,通过人工智能算法实时解析目标的运动状态,如速度、变形与轨迹。在此基础上引入物理AI,实现三维力场的实时感知。系统融合空中监测与智能推演,为复杂环境下的监控、预测与决策提供精准支撑,展示无人机与AI技术结合的创新方向。
过去很长一段时间,写了好多篇技术相关的推文。近来想着展示一波合作伙伴的成果案例;该无人机主要用于民用场景,能够实现座椅的状态监测和数字孪生。另国庆期间去了一波成都 感觉这个地方还挺不错的 有机会跟伙伴聚一波 聊一下 最后还很荣幸跟院士合个影~
大家对实时仿真还挺感兴趣,推文的阅读量、转发量和收藏量都有较大提升。将Abaqus结果转化为TXT文本或VTK文件,通过可视化页面,能够将任意零件、任意载荷步、任意单元编号的Mises应力和位移输出为TXT文本。
我们将AI与实时仿真相结合,实现了一个很有意思的工作。通过摄像头抓取结构的三维应力场。通过购买了手抛小飞机,进行了三维建模和对应的CAE仿真,后续通过模型降解实现边缘侧的部署,最终实现了通过摄像头获取小飞机的三维受力特征。
使用AI大模型进行焊缝缺陷检测,替代人力实现质检;使用AI大模型进行图像的识别,优缺点分别为:1.具有很好的泛化能力,很多场景都能够使用;2.速度慢:整体感觉速度太慢,比较吃硬件。