背景介绍
柔性抓取在各行各业都有广泛的应用;目前有两种技术流派:
1.集成触觉传感器,实现接触压力和接触切应力的感知,后续通过强化学习算法实现柔性抓取;
2.通过仿真,不依赖昂贵复杂的传感器,实现接触力的感知;该方法具有极高的性价比,制约因素在响应速度;
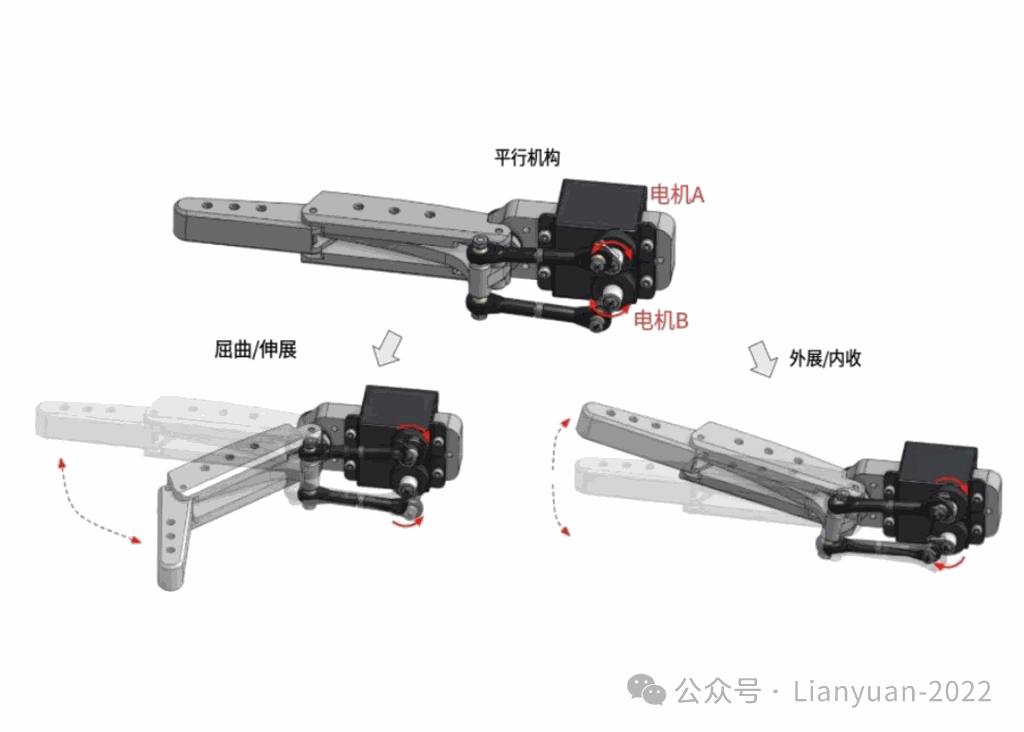
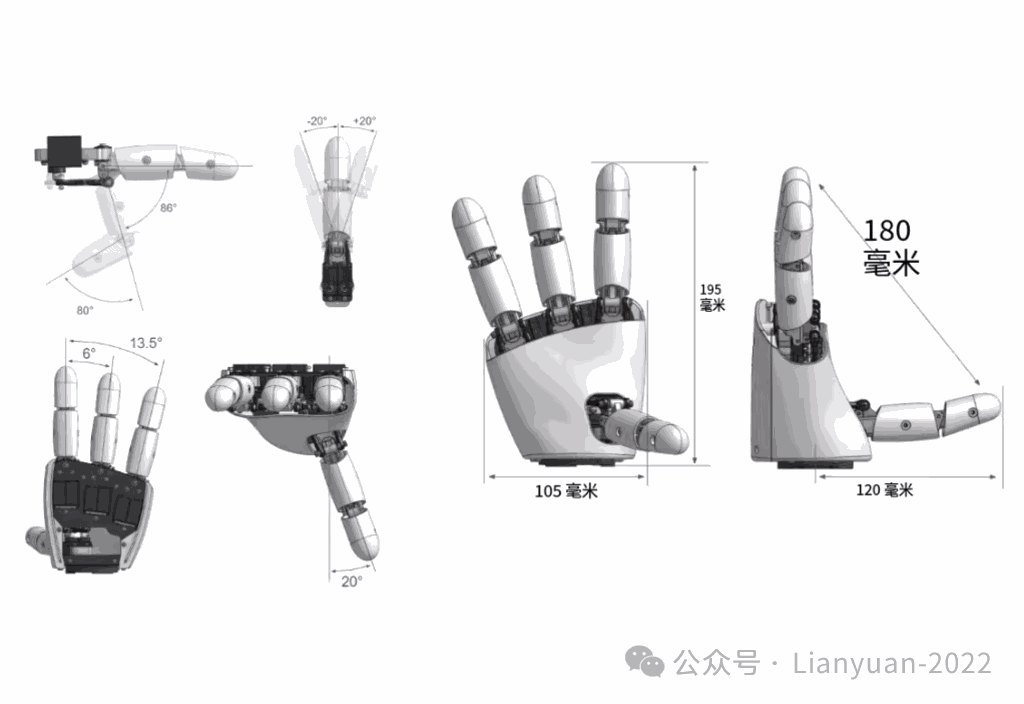
为了验证实时仿真的应用场景,我们通过机械手作为一个实验平台,通过舵机的扭矩实时感知抓取过程的接触压力和切应力,最终实现柔性抓取。
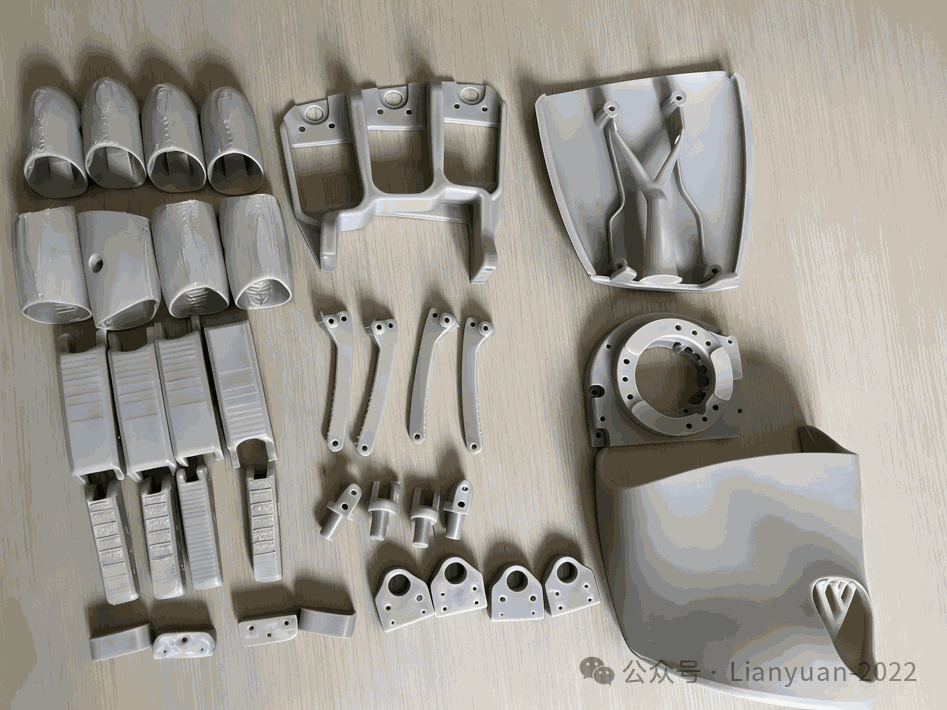
能够提供散件和组装调试后的成品,有兴趣可以提供组装教程,串口舵机,能够时间温度保护、位置检测和机械手状态检测等,比较适合DIY学习,舵机学习调试,具有极高性价比~
控制方法:提供Python程序,可以通过电脑串口直接控制(标准的TTL串口,可以通过USB线直接与电脑连接);
负载:200-300g,能够提供定制;
应用场景:动作展示,轻负载的抓取。