
背景介绍
实时仿真的核心目标为:见一页而知千秋;通过传感器获取关键点的物理量,最终实现全场三维感知。
我们过去在传感器采集端花费了较多的精力,与陈工一起不断打磨、迭代优化,最终形成了多款产品,具有较好的精度和优异的性价比,主要有:
一、采集节点(支持定制)
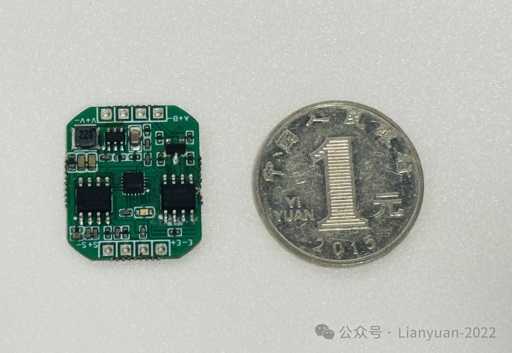

尺寸:23*23mm;
接口:RS485,采用modbus RTU协议,波特率115200;(同样支持TTL);
采样速率:10Hz或40Hz
滤波:内置卡尔曼滤波,能够有效屏蔽外界干扰;
二、边缘计算节点
边缘网关能够获取采集节点上传的数据,通过内置的AI算法,实现信息的提取和解算,最终结合实时渲染实现实时的仿真。

可以通过两种方式获取飞机的三维变形特征:
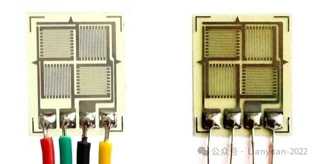
1.通过陀螺仪类传感器节点获取机翼末端的位移,后续将对应节点的位移输入代理模型,最后通过渲染进行可视化展示;
2.通过力学类传感节点获取机翼特征点的应变,后续将对应单元应变输入代理模型,最后通过渲染进行可视化展示。

